


Clear Prop! | #2
Martian eVTOL with Skis, NASA UAM Reference Vehicles, Air Ambulance Opportunities and Challenges & more

As the AAM community puts a strong end to the summer via the Farnborough International Airshow and the vacation season is in full afterburner mode, one question continuously inhabits the back of our minds:
Where are we as an ecosystem on the road to the commercial deployment of passenger-carrying eVTOLs?
I remember back in 2013 when Jeff Bezos famously made the prediction that Amazon delivery drones would be up & running by 2018. Fast forward to 2018, this obviously has not happened. Interestingly, this was around the same time that I entered the space and I distinctly remember that the hype around eVTOLs was increasing every single day. Startups and corporates joining the race every week, accelerating VC funding into early-stage firms, and growing mainstream media coverage were the themes of the day. Uber Elevate made exciting predictions around launching pilot ops by 2020 and commercial ones by 2023. Both of these timelines have seen a reality check as we have gone into the pandemic.
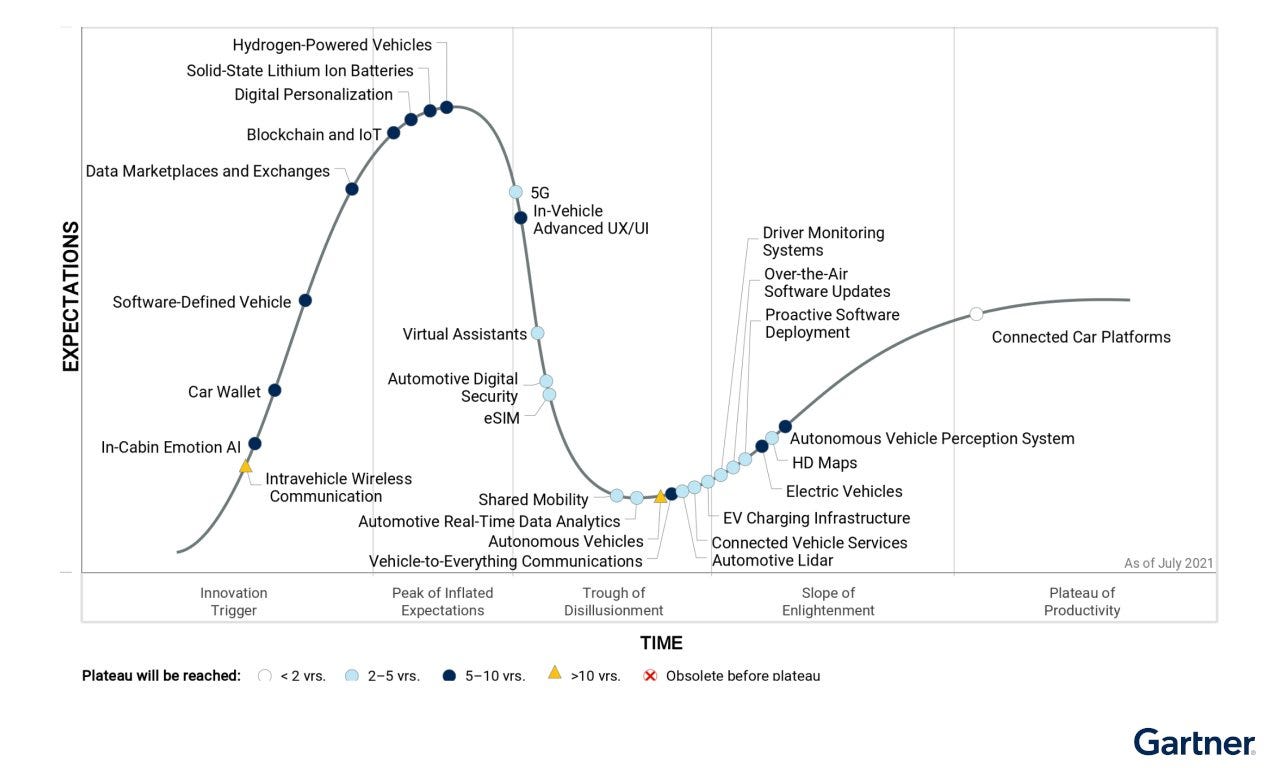
As we scale back our optimism a bit during this bear market, Gartner’s hype cycle is more relevant than ever. Arguably, AAM experienced the Peak of Inflated Expectations (PIE) at the climax of the SPAC craze (2020-2021).
The question is, where are we now on the graph above?
Are we rock-bottom at the Trough of Disillusionment (ToD) or have we passed that phase, working upwards on the Slope of Enlightenment? Please respond below and send me your thoughts by email.
#1: AAM - Opportunities & Challenges Deploying eVTOLs for Air Ambulance Service
In this paper published by the University of California, Berkeley and independents, researchers conduct a feasibility analysis of eVTOLs for aeromedical applications. An economic and operational model is built with the constraints set by anticipated vehicle performance parameters, both for fully-electric and hybrid eVTOLs across 9 design configurations. The authors then assess the suitability of eVTOLs compared to existing helicopter and ground ambulance missions.
Key takeaways:
Only electric & hybrid tilt-rotor and tilt-wing eVTOLs were found to be suitable due to range requirements of air ambulance missions.
Based on comparing total transport times, fully-electric eVTOLs may not be able to compete with ground ambulances for distances less than 40 km. Hybrid eVTOLs could compete for distances between 24-32 km.
It costs around $9,000 to operate fully-electric eVTOLs for each medical transport whereas hybrids cost ~$9,800. In comparison, existing helicopters cost around $10,000 and ground ambulances cost ~$500. However, this premium may be justified considering the scale that eVTOLs will bring due to higher fleet utilization especially when batteries are swapped rather than charged. The lower noise profile will also make them competitive against helicopters.
The BFD: Air ambulance is an extremely attractive use case for AAM for two main reasons: 1) it can directly increase the number of lives being saved and 2) could positively influence the social acceptance of eVTOLs when they are first deployed. In fact, when presented to rate the sound intensity of choppers flying over, people report hearing less when the helicopter in question is transporting patients and/or urgent medical goods. Ultimately, governments and society will have to decide if the investment into AAM and the premiums associated with it are worth the CAPEX/OPEX increase compared to ground ambulances. With the US government statistically valuing a human life at around $11M, the investment is likely more than justified. Check out exceptional partnerships in this space: BETA and United Therapeutics, Volocopter and ADAC and Dufour and Rega.
#2: Conceptual Design of Tiltrotor Aircraft for UAM
Researchers from NASA Ames size a dual-propulsor tiltrotor aircraft for a typical UAM mission, in two versions: turboshaft and fully-electric. This paper highlights the key design trade-offs that engineers have to make in VTOL aircraft, subsequently comparing the performance of the tiltrotor to other configurations such as multicopter, lift+cruise, and side-by-side. Finally, the researchers explore performance compromises between turboshaft and fully-electric propulsion choices.

Key takeaways:
The tiltrotor configuration achieves the highest performance on multiple metrics across other VTOL configurations. It has the smallest physical footprint, highest speed, smallest total mission (block) time, and the lowest maintenance cost per mission.
The fully-electric tiltrotor is sized with climb rate requirements whereas the turboshaft is sized against hover. Therefore, the fully-electric one has plenty of power margin for hover. If the mission requirements for climb rate is reduced, weight savings could be achieved exclusively for the fully-electric tiltrotor.
A turboshaft powered tiltrotor sized for a 500 nm mission still has an empty weight lower than a fully-electric one sized for 75 nm.
The BFD: This tiltrotor concept is the continuation of NASA’s UAM reference vehicles, essentially a way to showcase the state-of-the-art for the benefit of industry and academia. This provides a common knowledge base for future vehicles and prospective companies entering the space such that they don’t have to “reinvent the prop”. It is expected that these reference designs will be updated as the technology evolves.
#3: Conceptual Design of a Tiltduct Reference Vehicle for UAM
Similar to the previous paper on tiltrotor designs, NASA Langley introduces a tiltduct reference VTOL to primarily benchmark the effects of ducted fans on vehicle performance. The researchers size a turboelectric VTOL: one that uses a gas turbine to charge its batteries instead of a fully-electric one. Several acoustical considerations, direct drive & cross-shafted propulsion systems, and fan configurations are analyzed. The vehicle characteristics are then compared to the other NASA UAM reference vehicles with the final design reminiscent of the Bell Nexus 6HX.

Key takeaways:
A key design decision was to vertically and laterally separate fans to minimize wake impinging on wings and interference between fans. This optimizes for noise reduction and aerodynamic efficiency.
Compared to an open rotor, a ducted proprotor only requires 71% of the power for the same thrust. This is beneficial for noise and power efficiency purposes.
The resulting vehicle performance is comparable to a turboelectric tiltwing VTOL. Therefore, the choice between the two may depend more on the potential for noise reduction associated with ducted fans and the increased safety of closed rotors.
The BFD: The battle between the various eVTOL designs are being waged. Which configuration will be the dominant design once AAM matures? Is it going to be multicopters or tiltducts? Or perhaps there is space for many different designs across various use cases, geographies, environmental conditions, and such. Until we are past the fluid phase of eVTOL product innovation, these reference vehicles generated by NASA will be key to ensuring the right vehicles are deployed for the right scenarios. Structured, evidence-based decision-making here will be key as there is little to no room for firms to be agile on their product dev cycle due to the high CAPEX involved.
#4: Investigation of Certification Consideration for Distributed Electric Propulsion (DEP) Aircraft
Presented at the Vertical Flight Society, researchers from Continuum Dynamics, MIT and the FAA propose algorithmic methods to estimate how close a DEP aircraft is to loss of control (LOC) during flight. The authors argue that approaches that give a precise and real-time picture of the vehicle’s remaining power margin will be key to certifying novel aircraft such as eVTOLs under performance-based certification standards. By comparing the would-be expected motion of the vehicle for a given control input with the actual motion of the aircraft, software can determine the intensity of gusts, wind shear, etc., and thus the remaining power margin of the aircraft can be inferred for its safe operation.

Key takeaways:
Being able to continuously, reliably and robustly assess the remaining power margin of a DEP aircraft may be critical to airworthiness certification by authorities such as the FAA.
Such approaches are generally vehicle-agnostic and thus can be applied to various aircraft configurations. This has the added benefit that such information can be broadcasted in the form of “PIREPS” to other aircraft in the vicinity.
The approach is validated experimentally by flying a small drone through the jet exhaust of a Boeing 737 aircraft, which indicates the likely applicability in future eVTOL/DEP aircraft.
The BFD: Certification remains a key challenge for both OEMs and regulators of the AAM world. Algorithmic redundancies for operational safety is attractive because there is no added weight penalty to the vehicle. Gust intensity estimation will play a large role in allowing eVTOLs to fly near tall buildings in our cities as turbulence and downdraughts can be much more intense and frequent compared to conventional runways. The data output of such a system can also be fed to Unmanned Traffic Management (UTM), which would safely reroute aircraft in alignment with inclement weather. More aircraft (including small drones) in the skies would essentially mean more redundancy against weather.
#5: LILI (Long-term Ice-field Levitating Investigator) - Mars Aerial and Ground Explorer for Martian Polar Regions
April last year, NASA made the first powered, controlled flight in another planet with the Ingenuity Mars Helicopter. This is an ongoing “proof-of-concept” mission where the goal is to test aircraft in varying gravitational and atmospheric conditions. In this paper from NASA Ames, the researchers propose a roadable eVTOL tiltrotor concept with the primary objective of conducting a scientific expedition to the northern polar region of Mars. The solar-powered vehicle has two axially stacked rotors supported by skids/wheels. Both on the ground and in the air, the movement of the vehicle is supported only by the rotors, similar to a hovercraft. If sent to Mars in a future mission, the autonomous vehicle would be able to traverse icy/snowy terrain and fly over obstacles when necessary.


Key takeaways:
Variable pitch (rotor collective & cyclic control) is utilized to not only enable forward trajectories but also turns and reverse motion without the need for more complex tilting mechanisms.
With a gross weight of ~56 kg, LILI can climb to 50 m, cruise for 5 km, and drive for 5 km before needing to recharge its batteries.
The sizing of LILI is sensitive to the ground distance requirements and the ambient temperature, not to the flight mission requirements.
The BFD: Designing an autonomous roadable eVTOL for the Martian polar caps with lower gravity and atmospheric density than Earth is perhaps one of the toughest challenges that an AAM engineer might face. Designing for highly constrained environments will push the boundaries of eVTOL state-of-the-art to its limits, potentially introducing useful innovations to Earth-based AAM missions. As the authors of the paper point out, a similar type of vehicle configuration may be used to explore the polar regions of Earth itself.

This edition’s sponsor is Vertical Flight Society. VFS is an amazing resource that I use to access leading technical papers and workshop decks for my work. Whether you are an investor, engineer, researcher, or an entrepreneur, becoming a VFS member can give you an asymmetric advantage in the AAM space.
Membership gives discounted access to more than 15,000 technical papers, presentations and articles. Learn more here.
The 3 and 4 configurations are based on the design of the classic separation of the aircraft body and the propulsion system. They didn’t consider a synergic approach between the propulsion system and the aircraft (body and wings) configuration. It is a must for the future VTOL dominant technologies to take into account that.