


Clear Prop | #7
Earthquake Response Tech, Lift-Plus-Cruise Vehicle Sizing, AI Gym for AAM, Separation Standards & Corridor Analysis, and Practical eVTOL Deployment at DFW

Tragedy has struck again. And this time, in my fatherland. Two major earthquakes pillaged through southeastern Turkey with its effects being felt from the Black Sea all the way down to Syria, Iraq, Lebanon, and even Israel and Jordan. Magnitudes of 7.8 and 7.5, not to mention the numerous aftershocks, have wreaked havoc across 10 large cities in Turkey with more than 9,000 dead and 53,000 wounded as of February 8th.

There are likely close to 200,000 people currently under the rubble, awaiting help in the last 72 hours during a time of snow and ice-cold weather. Human voices being heard through the wreckages are gradually disappearing, indicating that people are dying of their injuries, hypothermia, or lack of water. Those who had their phones with them were tweeting (before Twitter was blocked in Turkey) about their whereabouts with their addresses, for urgent help. The situation is direr than most may think, with the disaster labeled as a once or twice-in-a-century type of event.
The lack of adequate & swift government support means that those on the streets have to help their families and neighbors buried under the cement, with no relevant equipment. We are hearing that people in freezing temperatures are using their own bare hands to excavate their fellow citizens, with state excavators & supplies not having reached the majority of the buildings or neighborhoods. The government is not deploying the bulk of the Turkish military, probably due to its fear of a potential coup. However, if the military was deployed very early on, we could have prevented at least some deaths that are occurring not just under the wreckage but on the streets where survivors have minimal access to basic supplies, food, warmth, and shelter. Some folks are even dying of hypothermia a short time after they are rescued.
Could the effects on human life have been prevented after such a disaster? Yes, and we see the best example of this in Japan. However, in a country where meritocracy is not the norm, where people justify everything with “it’s in our fate” type of logic, and where construction contractors steal from building materials while there is little oversight integrated with bribe money, disaster response at an organized, sophisticated level is minimal. To be ready for such catastrophes, we need 3 main pillars: 1) meritocracy at all levels of society, 2) honesty and virtue in all units of government, and finally 3) technology. Here, I will briefly explore what can be done on the tech side of things, specifically focusing on Advanced Air Mobility.

How can AAM technologies be leveraged for earthquake response?
In the immediate aftermath of a quake, Utility Drones can be deployed to assess the overall situation through real-time images and distribute a common operating picture to all stakeholders, generally with more precision than satellites. Using thermal imaging and intelligent software, survivors can be located, risk hotspots determined, and useable roads assessed. For first responders, these can help prioritize certain areas containing population-dense buildings like schools & hospitals, enabling them to reach these zones using the shortest distance possible. Once first responders are deployed, drones can be directed to specific buildings to create 3D digital twins with LiDAR to aid excavators in swiftly reaching people under the rubble. Drones can also be used to triangulate precise positions of smartphones buried under buildings, acting as a proxy for the location of potential survivors. Looters can be identified from the air, and security forces can be deployed to protect private and public property. Lastly, gas leaks can be detected, enabling the government to shut off valves to prevent fires.
Delivery Drones can transport first-aid kits to survivors in the streets. Besides medical aid, such supplies can include blankets, water, food, and even tents before more holistic supplies can arrive. Routine air corridors can be set up from disaster response & commercial logistics centers ensuring the whole population in the area meet their basic needs to survive without the need for in-person help, potentially for days. Special aid such as compact water, heat packs, and ropes can also be transported to the wreckage which can then be introduced through the gaps in the rubble to extend the survival rate of those buried under. Once emergency personnel arrives, special tools can also be transported on-demand to workers for them to be able to cut through cement, steel, and such.
eVTOLs, which are anticipated to have a smaller physical footprint than helicopters, can access more locations in-between wrecked buildings. And they can do it faster as some models have wings giving them airplane-like cruise performance. 1st generation eVTOLs may be optimized for a single first responder and equipment to arrive at hotspots, providing first-aid care. This would likely be faster than ground ambulances, and in certain cases, it may be the only solution if roads are blocked. A fleet of eVTOLs can deploy multiple teams to the most affected spots, enabling them to cover areas much faster. Future generations of eVTOLs with larger payload capacity (e.g. up to 10 people) may even carry injured persons, and doing it at a much lower operational cost. While helicopters today are more powerful in terms of their range, endurance, and payload capacity, eVTOLs are expected to be safer and cheaper to operate due to reduced maintenance requirements and electricity as their energy source.
Electrified Aviation may have significant benefits here. In major earthquakes, it becomes challenging to replenish the fuel supply of gas stations, further slowing down rescue operations. With decentralized charging infrastructure (e.g. airports self-sufficient in electricity generation), electric aircraft can continuously support rescue efforts without relying on fuel trucks from nearby cities to arrive. Electrification, coupled with VTOL or STOL capabilities, can enable aircraft to land on runways that are too damaged for CTOLs to land.
Unmanned Traffic Management, which is the concept of digitizing airspace management specifically for drones and eVTOLs, is key to coordinating aerial ops that are safe, effective, and efficient. It provides a near real-time “god’s view” operating picture of low-altitude airspace, permitting flights with minimal delays which is highly important to disaster response. It can also enable autonomous operations, contributing to the speed and volume of delivery of emergency services to survivors. An ad hoc network through portable stations can be set up to coordinate the disaster zone if communications are impeded, or a Starlink-type of service can provide low-latency infrastructure for reliable flight plan approvals, deconfliction, and real-time positioning.
As of today, drones have saved 940 lives in rescue ops across 39 countries according to DJI. They were used in the 2015 Nepal earthquake and Hurricane Florence in North Carolina in 2018, and are routinely being used for medical deliveries by companies such as Zipline and Matternet. However, it is estimated that 10,000 people per year die due to earthquakes. Perhaps AAM can significantly reduce this number, not just with quakes but also floods, tornados, mudslides, and more.
I am sending my sincere wishes to all earthquake victims and hoping that people under rubble in Turkey and Syria are rescued as swiftly as possible. If you want to help, donating through Ahbap is the best way to do so. Thank you for all your help.
#1: Sizing and Analysis of a Lift-Plus-Cruise VTOL Aircraft with Electrified Propulsion Systems
Researchers from Auburn University propose an aircraft sizing & analysis method for lift+cruise VTOLs. Their Parametric Energy-based Aircraft Configuration Evaluator (PEACE) can size an eVTOL for all-electric, hybrid-electric, and turboelectric variants while trimming the aircraft for nominal and off-nominal flight conditions. The approach demonstrates trade-off studies across disk loading, wing loading, battery energy & power density, etc., making it painless when choosing the optimal eVTOL variant for a given mission profile.
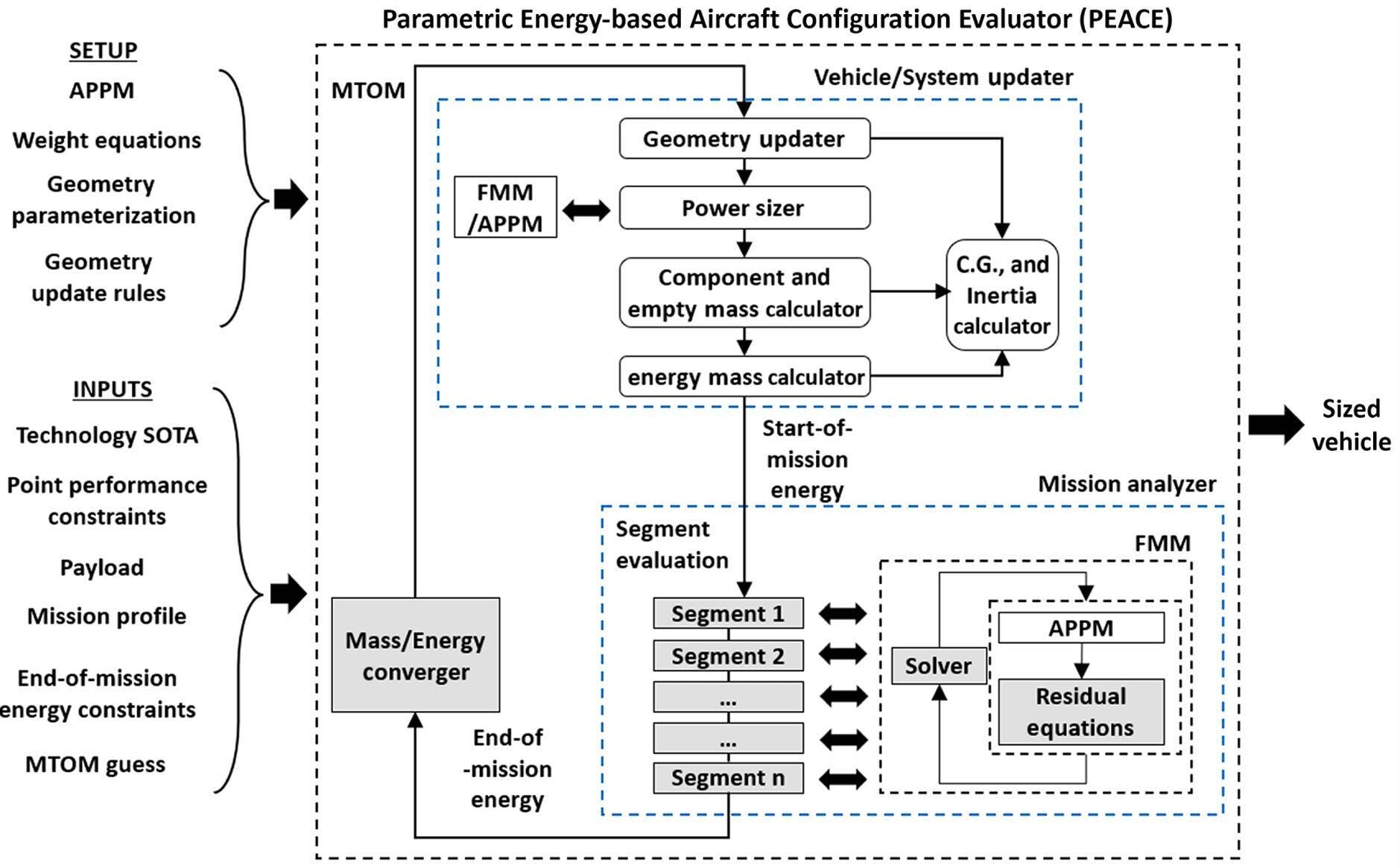
Key takeaways:
The maximum takeoff weight (MTOM) of all-electric, hybrid-electric, and turboelectric variants show different sensitivity to battery specific energy, specific power, and trip distance. The all-electric variant is highly sensitive to trip distance and specific energy. The hybrid-electric variant is mainly sensitive to specific power as it is sized by hover requirements and thus, battery discharge rate. The turboelectric variant is only sensitive to trip distance.
Both high and low disk loadings result in increased MTOM. A “sweet spot” exists in the middle where MTOM is minimal. Higher disk loading means higher hover power requirements, leading to a heavier propulsion system. Lower disk loading, on the other hand, means larger lift props, also leading to a weight penalty.
Rather than sizing the tail using historical volume ratios, an explicit dynamic stability analysis is used to achieve target handling qualities criteria. For all the eVTOL variants, all dynamic stability criteria were met with level 1 handling qualities except for the short-period mode, which satisfied level 2.
The BFD: This research was selected as the Best Paper for 2022 by the AIAA Electric Aircraft Technology Technical Committee, the second award for the lab at Auburn based on work done with the PEACE tool. Traditionally, aircraft have been sized using historical weight ratios. However, the advent of electric aviation and novel architectures brought by distributed electric propulsion reinforces the need to incorporate physics-based models when designing a clean-sheet, innovative aircraft. Only then, a true sizing estimation of an eVTOL can be made, closing the loop between weight, geometry, mission, and aeropropulsive requirements.
#2: AAM-Gym: Artificial Intelligence Testbed for Advanced Air Mobility
In this paper from MIT Lincoln Laboratory, researchers propose an “AAM-Gym”, which is a simulation testbed for researchers to test and benchmark AI algorithms across aerial mobility use cases. Inspired by the OpenAI Gym philosophy, researchers and industry can develop, train, and validate various algorithms for scenarios such as 4D trajectory planning, tactical deconfliction, traffic prediction, and the like. The platform provides a standardized interface that enables a common standard for the effectiveness of various algorithms in aerial mobility, similar to how the MNIST dataset has become the foundational benchmark for ML in image processing.
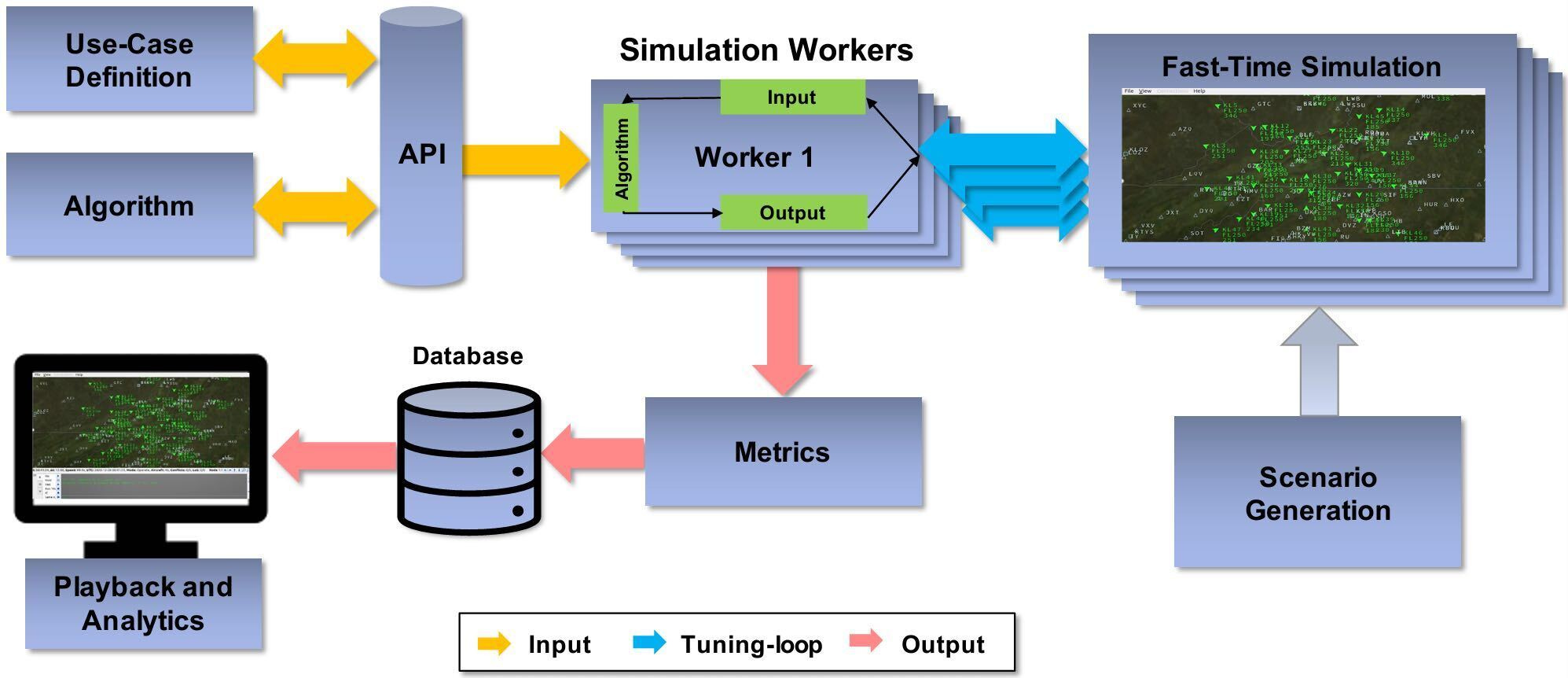
Key takeaways:
The platform provides fast-time simulation capabilities through BlueSky, generates dynamic environments with MIT’s UAMToolKit, and integrates live air traffic from the OpenSky Network for highly customized & realistic conditions.
Users of the platform can collect safety metrics such as alert, airborne holding, near mid-air collision (NMAC), and loss of well-clear (LoWC) rates to benchmark their algorithms. They can also evaluate performance against real-world baselines such as ACAS sXu.
Currently, AAM-Gym is customized for testing reinforcement learning (RL) algorithms. However, the platform is flexible to accept other types of machine learning approaches such as supervised and unsupervised learning. The authors explore a case study comparing two RL algorithms, DDQN and D2MAV-A, demonstrating AAM-Gym in action.
The BFD: The introduction of non-deterministic algorithms i.e. AI/ML to aviation in safety-critical systems has been virtually non-existent. And rightly so, as for these “black-box” algorithms industry and regulators have not carved out a clear-cut path for certification. The ability to test and evaluate through simulation on a platform that is accepted and standardized both by industry and regulators can make leaps into solving this certification problem for AI. AAM-Gym is a step forward in this regard.
#3: Preliminary Analysis of Separation Standards for Urban Air Mobility using Unmitigated Fast-Time Simulation
Researchers from NASA Ames, Crown Consulting, and Universities Space Research Association simulate a UAM traffic scenario over Dallas Fort Worth (DFW) airspace with the objective of investigating future separation standards for UAM aircraft. Overlaid with real, historical non-UAM traffic, the authors measure the following safety metrics across various separation minima: 1) loss of separation (LoS) rate, 2) near-mid-air collision (NMAC) rate, and 3) unmitigated collision risk.
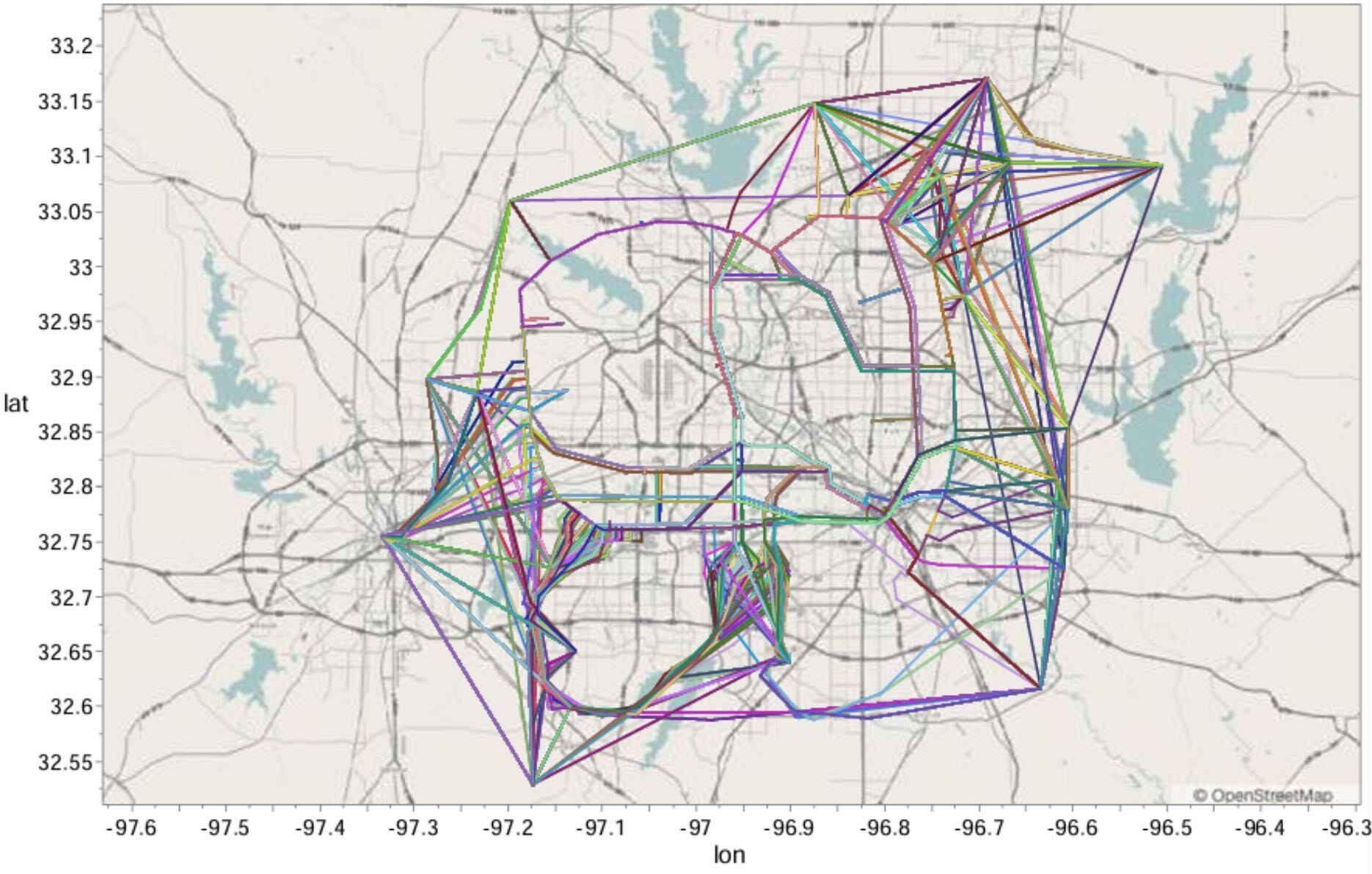
Key takeaways:
The analysis is based on “unmitigated” risk of collision which puts an upper bound to the separation minima. It assumes that no maneuvering or deconfliction is made between vehicles that are in conflict.
The proposed UAM airspace design over DFW, characterized by corridors, has a high collision risk between UAM flights. This ranges from 2 to 26 LoS events per hour for horizontal and vertical separation spanning 750-6,500 ft and 150-450 ft, respectively. On the other hand, LoS events between UAM and non-UAM aircraft were much lower owing to the design of UAM corridors around IFR flights.
An earlier study has suggested an unmitigated collision risk of 2.2% for UAS. This risk value between UAM and non-UAM aircraft can be achieved with a horizontal separation of 4,500 ft and a vertical separation of 500 ft. For target risk between UAM aircraft only, these values would need to be 6,500 ft and 450 ft, respectively, which may not be operationally feasible.
The BFD: Today, there is no consensus on what separation standards should be for various UAM aircraft ranging from small drones up to large passenger eVTOLs. It is generally thought that initial piloted ops may use similar separation minima to current helicopter routes. However, with the advent of 2nd-gen eVTOLs which will bring increased automation, advanced unmanned traffic management, and precision weather & traffic sensors, separation minima may well decrease with higher safety assurance. Simulations are one way to reduce risk to acceptable levels while ensuring the swift roll-out of UAM services in our airspace.
#4: A Metrics-based Method for Evaluating Corridors for Urban Air Mobility Operations
In this paper from UC Berkeley, Crown Consulting, and Lawrence Berkeley National Laboratory, researchers propose a methodology to evaluate urban air corridors and select the best ones according to safety, operational, and environmental metrics. Compared to the previous paper (#3), this approach does not simulate new UAM traffic. It solely uses historical air traffic data with numerical and geometric modeling to analyze an air corridor with given dimensions and location. Multiple corridors are analyzed within 150 mi of Edward AFB near LA, as a case study demonstration.

Key takeaways:
A score is given to each corridor based on the total number of aircraft within 24 hours, total aircraft travel time, and the number of aircraft staying longer than 4 minutes in each geometry. This allows a standardized benchmark to compare several corridors and their interaction with legacy aircraft.
A heat map is built for a given altitude to evaluate a cost function for different latitudes and longitudes. Based on the distance between the centroid of each grid with the middle point of the trajectories of all aircraft in the airspace, a cost value can be calculated for the grid. This enables the optimal planning of corridors for a given airspace.
Based on the analysis of Edwards AFB, high-resolution insights are given such as dynamic corridors that would shift shape between nighttime and daytime operations. Since the cost was much higher between 9am to 6pm, special cargo corridors can be “turned on” after 6pm while passenger corridors could be optimized during the day.
The BFD: As outlined in FAA’s UAM ConOps 1.0, corridors will likely form the initial form of procedural separation that will enable UAM ops within controlled airspace. However, the approach to designing and placing such structures with high safety assurance is unclear. This paper, therefore, provides a geometrical method based on real air traffic data without the assumptions made by simulation or neural network methods, which may or may not be representative of reality. A reliable & robust method for corridor design will accelerate the introduction of UAM vehicles into controlled airspace in the near term, without the need for high automation or UTM.
#5: Near Term Urban Air Mobility Use Cases in the Dallas Fort-Worth Area
NASA Ames, Langley, and Joby researchers and engineers outline a practical, near-term vision for implementing UAM services within Class Bravo airspace. Centered on the Dallas-Fort Worth area, which hosts 3 major airports (DFW, Love Field, and Addison), the area provides a highly attractive use case for eVTOL operators due to its large population, industrial activity, and multiple population centers. Through five UAM use cases and input from the FAA and airport authorities, the industry & academia team propose various approaches for eVTOL integration with minimal impact on ATC workload and no changes to existing airspace regulations.
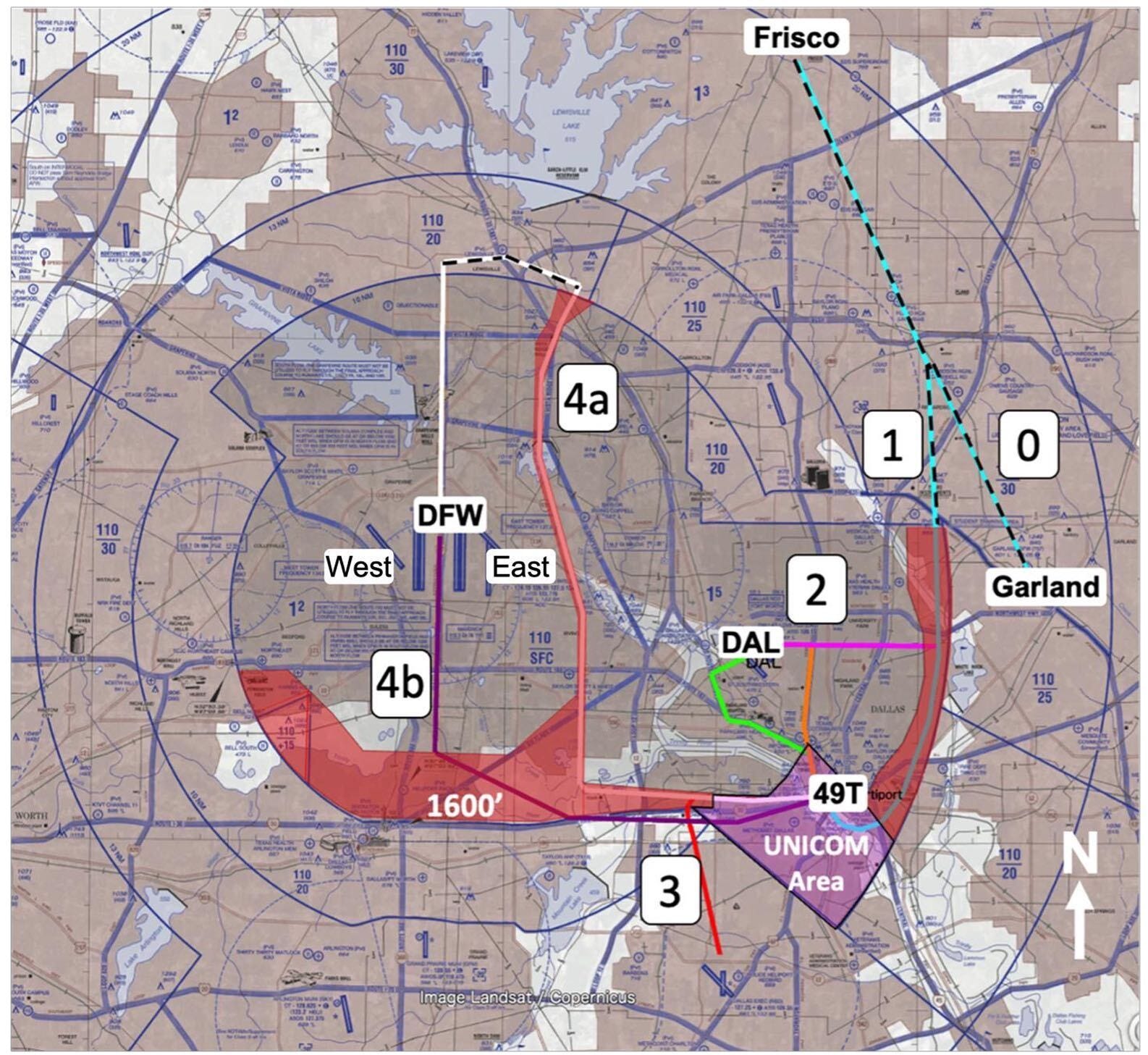
Key takeaways:
The five use cases are 1) Frisco to Garland (Class E/G airspace), 2) Frisco to Downtown Dallas (Class E/G to B), 3) KDAL airport to Downtown Dallas (Class B), 4) KDAL to DFW airport but flight redirected to Redbird airport (Class B to D), and 5) KDAL to DFW airport using the Spine Road (Class B).
A Letter of Agreement (LOA) is proposed for entering and leaving Class B airspace, landing at DFW, and vertiport operations in the downtown area. This LOA enables UAM vehicles to be given pre-assigned beacon codes and fly through precisely defined routes, limiting ATC comms and workload. The LOA also prescribes a UNICOM area over Downtown Dallas, allowing signatory operators to treat it as an uncontrolled airport, announcing their own locations, and self-deconflicting.
To land at the Corporate Aviation Ramp, which is where a vertiport may be located at DFW, aircraft need to follow the Spine Road situated between the east and west terminals. However, this may be problematic due to wake advisory criteria which would be violated during legacy aircraft landings and crossover traffic between runways. It was found that north flow departures violated an acceptable wake encounter rate of 5%, in some cases up to 42%, requiring much larger tactical handling by the ATC. This was deemed unacceptable.
The BFD: When we envision how UAM will roll out, we tend to think more about future operations with high automation, novel airspace design & procedures, and UTM. However, for these regulatory changes to occur and tech to be certified, it will take longer than we may anticipate. Thus, it’s key to propose solutions that will work within current regulations while enabling low-scale flights. This report results in two major findings: 1) UAM can already take place in Class E/G today with relative ease and 2) with LOAs and helicopter-like routes, low-volume ops can be executed in complex, busy, and controlled airspace.

This edition’s sponsor is Vertical Flight Society. VFS is an amazing resource that I use to access leading technical papers and workshop decks for my work. Whether you are an investor, engineer, researcher, or entrepreneur, becoming a VFS member can give you an asymmetric advantage in the AAM space.
Membership gives discounted access to more than 15,000 technical papers, presentations and articles. Learn more here.