
Clear Prop | #6
2023 Predictions, ML for Power Consumption, Multimodal Systems, Joby's Design Journey, Electrical Grids & more!

Looking back into the earlier days of eVTOL in 2017 when I first got into the field, many of us were a bit too optimistic about the roll-out of eVTOL services, in one shape or another. We - especially the younger generation in our 20s and 30s - felt at the time that eVTOL pilot tests in 2020 and commercial launch by 2023 were within the realms of possibility in select cities around the world. Part of this can be explained through a common human bias called Amara’s Law:
“We tend to overestimate the effect of a technology in the short run and underestimate the effect in the long run.”
In effect, the individual dreams most of us had of flying through skyscrapers as kids, coupled with the inability of the human mind to truly grasp compounding growth, blinded us to some of the realities of eVTOL certification. Back in 2018, I distinctly remember reading one of the first systems-level commercial reports for vertical mobility written by Porsche Consulting where the authors estimated the earliest commercial eVTOL launch to be 2025. I thought this surely had to be pessimistic.

Fast-forwarding to 2023, Porsche’s 2025 prediction looks more likely than ever. And to quote an old adage known in aerospace circles: “If companies give product launch roadmaps, generally it’s a good idea to add 5 years on top.”
The last couple of years, therefore, taught me to be more critical and realistic in predicting the adoption of innovation, especially when it comes to novel aircraft. In the spirit of this, I’d like to give you my predictions for 2023 as they pertain to AAM:
Private and public investment will further dwindle. With the headwinds of inflation, high-interest rates, supply chain issues, geopolitical conflict, and the potential for a hard economic landing sometime this year, investors will allocate less capital to a smaller number of companies that have made the most technical progress. What will matter more are the certification progress and the focus on product, and less are the marketing gimmicks such as non-binding aircraft orders and public flight demos. Multiple OEMs may go out of business, potentially being acquired by large aerospace corporations (OEMs & Tier 1) or private equity firms.
Cost-cutting will be the norm. Expect firms to outsource critical and non-critical functions such as business strategy, battery production, component validation & verification, etc. While hard to do when a novel tech is being introduced, there will be a trend towards horizontal integration of the supply chain rather than doing everything in-house. There may be some layoffs, although this won’t be as significant as Big Tech since aerospace salaries are generally lower than, let’s say, AI. Public eVTOL firms - which have a much harder path toward raising additional funding - will be at a disadvantage here compared to private firms.
Well-funded firms will make steady strides in type certification. In 2022, we witnessed the FAA publishing proposed airworthiness criteria for Joby and Archer, which are big milestones for the industry. Expect more news on these firms getting approvals on means of compliance & certification plans, preparing to ramp up for flight testing with the FAA through 2024. While FAA’s recent plot-twist of proposed eVTOL certification under the “powered-lift” category rather than Part 23 regulations potentially slows the certification process, the US regulator will still offer a more flexible roadmap to OEMs compared to EASA’s more stringent safety goals of one catastrophic accident per billion flight hours.
Before we dive into this edition’s technical papers, I’d like to share with you a more general set of predictions concerning AI, robotics, and mobility. Check out this great thread by Brett Adcock, the co-founder of Archer:

Onwards to our technical papers!
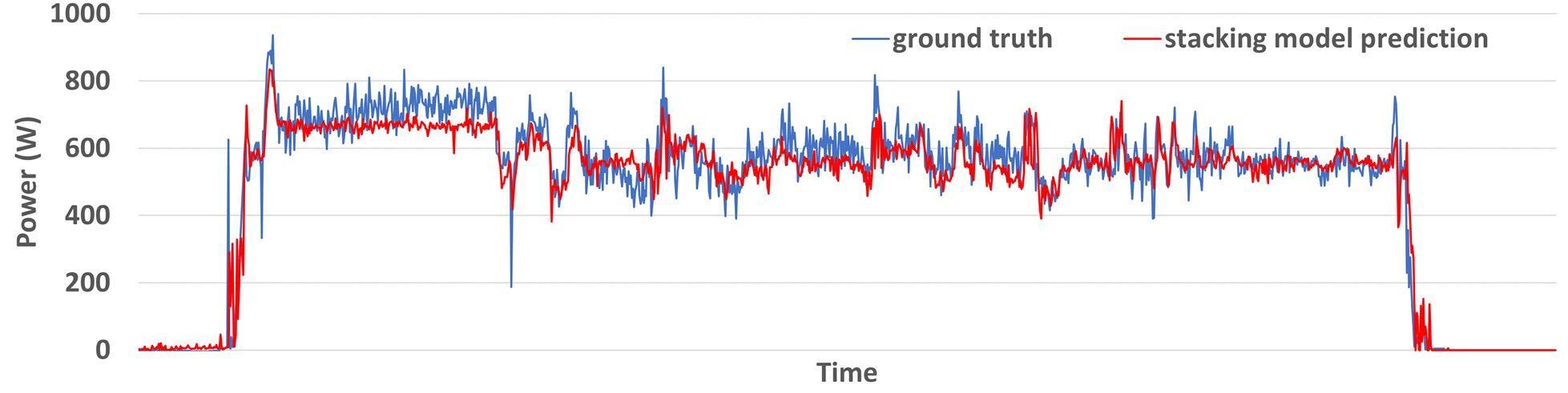
#1: Data-Efficient Modeling for Precise Power Consumption Estimation of Quadrotor Operations Using Ensemble Learning
Researchers from the Nanyang Technological University in Singapore propose a machine learning model to estimate the power consumption of eVTOLs accurately. By using ensemble learning - a method of combining multiple ML models together - they can make accurate estimations with lower computational cost. The model only needs precise measurements of aircraft velocity, acceleration, attitude, and angular velocity in addition to wind speed and direction.
Key takeaways:
Ensemble learning, specifically stacking, can outperform state-of-the-art models including Multilayer Perceptrons and Temporal Convolutional Networks across various error metrics.
Their model performs more accurately than others using much less data. Specifically, previous models use 20-30 hours of flight data while ensemble learning needs 1-1.5 hours making it 10-30x computationally cost-effective.
The approach is thought to be highly scalable to other vehicle types as the ML model only uses aircraft kinematic states and key environmental factors. No information on the custom aspects of a vehicle's make & model is needed.
The BFD: Performance specs given for a vehicle by the OEM may not be applicable to all operational and environmental profiles. Wind and traffic deconfliction can alter flight trajectories, leading to more consumption of power. For instance, a 2-hour endurance spec for a drone may decrease to 1.5 in adverse weather & high-density airspace. As batteries are still a key limiting factor, estimating the remaining battery charge will be important in ensuring vehicles don’t prematurely fall out of the sky.
#2: A Survey of eVTOL Aircraft and AAM Operation Hazards
The inter-university research team from George Washington University, Vanderbilt University, the University of Texas at Austin, and MIT Lincoln Laboratory outline the main mission, vehicle, and airspace hazards for eVTOLs. Part of NASA’s System-Wide Safety project to 1) understand the risks associated with novel aviation tech and 2) research relevant mitigations, this paper explores “1)”, i.e. risk identification.

Key takeaways:
While headwinds have an obvious detriment to ops, tailwinds can also cause hazards such as overrunning take-off/landing infrastructure and early arrivals.
The decrease in the ratio of max charge to the max rated capacity of a battery over time decreases max available power, critical during gusts, downdrafts, and so on.
Mission, vehicle and airspace functions are highly interrelated. For example, a delay in charging can cascade 2nd order effects through the airspace, potentially causing most or all aircraft in the system to be delayed. Check out chaos theory.
The BFD: The identification and deep understanding of all risks associated with eVTOL ops is a crucial step in ensuring system-wide safety. Only then, reliable and robust mitigation tools, tech, and operational methods can be proposed. Exploring such mitigations is the next step for the team, which will be validated through use case simulations and sub-scale flight tests. Separately, NASA recently released open-source MATLAB/Python tools to quantify & propagate uncertainty, which can be applied to eVTOLs, UAS, spacecraft, or other dynamic systems containing uncertainty.
#3: Operations Study on a Multimodal Transport using Cargo eVTOL Aircrafts and High-Speed Rail
Engineers from Yamato Holdings - which is the largest parcel delivery service provider in Japan - envision a future freight system combining high-speed rail (HSR) and cargo eVTOLs. Building on their collaboration with Bell on the APT 70 program, they propose a detachable cargo pod platform, namely PUPA, which is designed with ground freight integration in mind. They analyze transport durations compared to other alternatives, investigate infrastructure requirements, and touch on economics.

Key takeaways:
Japanese HSR - “Shinkansen” - does not have any freight operations today due to high passenger demand & economic incentives. Therefore, freight trains are separated from HSR, operating on lower-speed, narrow-gauge, local tracks.
Using eVTOLs in combination with HSR would be somewhat slower than using eVTOLs alone or traditional fixed-wing aircraft. However, HSR provides an enormous cargo capacity that neither eVTOLs nor aircraft alone can provide.
A free gauge train (FGT) system is proposed, enabling parts of the train to operate both on the Shinkansen and on local, narrow-gauge lines. This would allow the cargo carriages to detach at the terminals while the passengers would continue on the local lines, leading to a seamless, transfer-free experience for passengers.
The BFD: Among most research in AAM that originates from academic institutions, a private company undertaking research at the practical level is highly valuable to the ecosystem. Furthermore, Japan presents a unique case with a remarkably efficient HSR network, particular geographical constraints, and differentiated social structure. This highlights the highly localized considerations that engineers will need to contemplate when designing multimodal eVTOL networks, customized per country.
#4: Development of eVTOL Aircraft For Urban Air Mobility At Joby Aviation
In this paper, long-time Joby engineer Alex Stoll (Aeromechanics Lead), and JoeBen Bevirt (Founding CEO), take us through a journey of their vehicle development process since 2009. They outline the rationale behind key design choices, their several R&D projects with NASA leading to key tech enablement, and the aircraft systems configuration that have led to the performance and safety specs of their current pre-production prototype.

Key takeaways:
The tilt-prop design choice is based on a careful balance between safety redundancy, cruise efficiency, and noise. The Joby eVTOL doesn’t have the single points of failure of tilt-wings, disk loading issues of tilt-ducts, and the limited lift-to-drag ratio of lift plus cruise designs, according to the analyses of the team.
Props are positioned strategically for thrustborne flight (i.e. hover), limiting the maximum increase in motor power to 150% in case of a wingtip prop failing. Furthermore, adequate control and minimal download over the wings are achieved by actuating wingtip and tail props aft, and the remaining props forward, as they tilt up from cruise to hover.
Specific torque i.e. how lightweight the motor/inverter combination is for a given torque, sits at 60 Nm/kg (20 ft-lb/lb) for the Joby eVTOL. In perspective, the Tesla Model 3 motor (without inverter) gives 10 Nm/kg (3.3 ft-lb/lb), highlighting the progress in electric motor tech with weight acting as a primary constraint.
The BFD: Joby Aviation (JOBY 0.00%↑), while known for its relative secrecy about most of its inner operations and strategic moves, has actually published multiple technical papers in the last decade giving us access to a “first-person view” of its eVTOL. Being transparent is of utmost importance, especially for public companies in the eVTOL space which have no recurring revenue nor a commercial product yet. As we go into 2023 with a potentially hard economic landing, investor capital is more valuable than ever. Only with technical transparency will future retail and institutional investors be able to make rational judgement calls when backing these companies to success.
#5: Analysis of Electrical Grid Capacity by Interconnection for Urban Air Mobility
In this paper from NASA Ames, the researcher proposes a model to estimate the maximum number of eVTOLs that the electrical infrastructure of the US can potentially support, extending towards 2050. By using data and certain assumptions on peak grid usage, adoption of ground EVs, and EV & eVTOL charging rates, the researcher is able to estimate the total grid capacity likely to be available for a nationwide eVTOL fleet in competition with ground vehicles.

Key takeaways:
If key assumptions hold through 2050 (40% EV adoption, 1.54% electric capacity growth p.a., 75% grid utilization, 0.52% national population growth p.a., etc.), capacity to charge eVTOLs will be 20% lower in 2050 than it was in 2021.
Out of the 3 electrical interconnections in the continental US, the Texas Interconnection provides the most promising result with virtually zero decreases in eVTOL charging capacity. This is because Texas has high grid capacity relative to the projected number of ground vehicles and thus, EVs.
Increasing the electrical generation capacity of the US, lowering charging wattage for EVs and eVTOLs, and distributed & off-peak charging can reverse this constraint on eVTOL charging.
The BFD: While regulations, landing infrastructure, social acceptance, airspace capacity, and vehicle tech may be the primary bottlenecks that UAM is facing today, grid capacity will be the constraint that eVTOL and vertiport operators will need to think about for ops at scale. This is a problem that can be solved. However, due to the large investments into fixed assets necessary to enable a robust and high-capacity grid for both EV and eVTOL traffic, planning and development should be done today with 2050 in mind. Everything points towards the need for 1) more renewables and perhaps nuclear, 2) decentralized electricity generation for personal EV charging, and 3) more private and governmental investment into battery R&D.

This edition’s sponsor is Vertical Flight Society. VFS is an amazing resource that I use to access leading technical papers and workshop decks for my work. Whether you are an investor, engineer, researcher, or entrepreneur, becoming a VFS member can give you an asymmetric advantage in the AAM space.
Membership gives discounted access to more than 15,000 technical papers, presentations and articles. Learn more here.
#4. The Joby tilting front propeller location is being standardized as is also used by Archer, Vertical Aerospace, Supernal and now Wisk. With this configuration, the propulsion system suffers from a major disadvantage in transition, namely when the power requirements are at maximum. At the beginning of the transition, the wings are blown from top to bottom and an increased pressure appears on their upper surface instead of creating a depression (as is desirable for an efficient wing). Consequently, the demand for power increases even more. They still fly due to the excess power for which they are designed, but the flight is inefficient in transition. Moreover, the number of tilting mechanisms is big, increasing the weight, complexity, and cost of the vehicle. There are a number of more efficient configurations and for sure the Joby solution will be not the dominant technology of the future.