
Clear Prop! | #5
Chinese eVTOLs, Korean GPS & Airspace Ownership Law, Collision Avoidance Algorithms, and 3D Urban Noise Prediction

Back in October, I had the opportunity to support the Vertical Flight Society at AirTec in Munich. AirTec is an aerospace-themed conference with a significant focus on innovation such as future flight, space, materials, supply chain, and so on. It is small enough that you can meet virtually everybody across 2 days while large enough that the content represents advanced air mobility through its multitude of segments.
Some of the leading startups and innovators from Europe, the Americas, and Asia exhibited and shared their thoughts on stage for the future of aerospace. Here is a quick list of the ones that stood out to me, in no particular order:
Væridion - a micro-liner eCTOL specifically designed for the regional markets under 500 km routes for 9 passengers. HQ in Munich, Germany.
AutoFlight - a lift+cruise configuration eVTOL that is one of the very few companies able to demonstrate transition from helicopter mode to forward flight. HQ in Shanghai, China with a large presence in Europe.
Pipistrel by Textron - a pioneer in green general aviation aircraft, Pipistrel is currently working on a H2-fueled micro-liner with 1,100 nm range for 18+1 pax. HQ in Ajdovščina, Slovenia.
Electro.Aero - an electric aircraft charging company that has partnerships with leading AAM players such as Archer and Ampaire. HQ in Perth, Australia.
Technical University of Munich (TUM) - a highly innovative institution working on lift+cruise eVTOL control models, which they exhibited with a 6 degrees-of-freedom simulator.
While hundreds of pages of material can be written on these cool organizations, I’d like to share with you a perspective that is often not seen by many of us working primarily in the Western eVTOL / drone industry: China. Most of us are pretty much aware of EHang as the presumed pioneer of eVTOL in the country. However, as Willi Tacke - the founder of Flying Pages / Flying China general aviation magazine - pointed out during his insightful presentation at AirTec that there is much more innovative, regulatory and policy activity happening within the Chinese AAM ecosystem. With the following, I would like to give you the key insights:
The Chinese Communist Party (CCP) enrolls a top-down approach for the nationwide strategic implementation of AAM. Novel aviation tech is part of CCP’s five-year plan with clear goals to establish a nationwide system for large UAS and AAM aircraft by 2035.
The Civil Aviation Administration of China (CAAC) is mandated to establish rulemaking for future aircraft. In 2021, the CAAC published a draft of type certification regulations for EHang 216, in addition to UAS operational regulations with a pathway towards autonomous pax-carrying vehicles. The organization has a certification framework for UAS up to 5,700 kg MTOW.
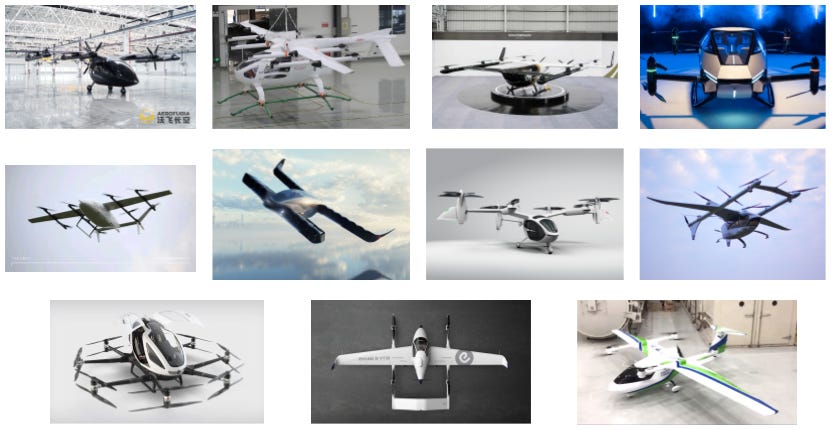
There is a multitude of startups and corporate projects that range from the promising to the questionable. In no particular order, these include Geely’s Aerofugia, MuYu Aero, Volkswagen China V.MO, XPeng HT Aero, Volant Aerotech, Pantuo, TCab, AutoFlight, EHang 216, EHang VT-30, and COMAC (these can be seen in the image below starting from the top row, from left to right).
I estimate the combined VC and internal corporate investment into AAM between $700M-1B, based on publicly available information. This makes Chinese firms grab 5-7% of the global investment into the field (approx $15B in total globally).
Onwards to the technical papers of this edition of Clear Prop!
#1: Study on the Means of Legislating the Range of Ownership of Air Space Above Land for Drone Taxi (UAM)
In this paper, researchers from Korea Aerospace University investigate the relationship between land law and AAM vehicles that may violate property rights by flying over to private land. Basing their case studies on South Korea and international precedents, they highlight the necessity of more research and legislative action due to the uncertainty in interpretation surrounding previous court rulings. As an outcome, a new set of regulations, a “Drone Act”, by the Korean government is recommended to future-proof the aerial transportation system and ensure the swift roll-out and scale-up of drone and eVTOL services aligned with public trust.

Key takeaways:
In most countries, land ownership extends above and below the land's surface. In the US, controlled airspace is above 500 ft during the day and 1000 ft at night. In Korea, controlled airspace can come down to 200 m AGL (~650 ft). Thus, unless the operation is within the interest of the public (e.g. military, air ambulance, etc.), property below these thresholds may not be violated. The caveat is, these minimum altitudes are open to interpretation when it comes to property law.
There have been legal cases where under the current law, both the landowner and the aircraft operator can be argued to prevail. This highlights the insufficiency of current legal systems at the intersection of land ownership and aviation.
If no legislation is enacted, this will be a large hindrance to the scaling of AAM services across higher population-density areas. The researchers propose that this “Drone Act” 1) limits compensation for airspace above 200 m, 2) stipulates for UAM operators to compensate landowners below 200 m, and 3) sharply defines exceptions when public and private interests co-exist.
The BFD: Land law is supremely important to how future drone and eVTOL services will look in highly populated areas. Even if an eVTOL spends most of its time above the minimum altitude (e.g. 500+ ft in the US), it will need to come in for a landing or takeoff. Small drones on the other hand exclusively operate below 400 ft. Although eVTOL approaches & departures will likely have steeper angles than current helicopter ops, trajectories - for safety/efficiency - will ultimately intersect with private property (think of a vertiport in a tight valley or an urban canyon where eVTOLs have only a single 3D path that is executable within prescribed safety limits). Thus, legislation is direly needed here to ensure aircraft operators are protected (e.g. not shot down for trespassing), property owners are compensated, and public safety ops are prioritized. In fact, certain UTM firms based their initial business models on this almost a decade ago: and without a legal framework, they were not feasible.
#2: How to Operate UAM in Megacities Using Korean Positioning System
Researchers from the Korea Military Academy, Pai Chai University, Korea Aerospace Research Institute, Korean Army, and Woosuk University explore several use cases for implementing UAM services using the upcoming Korean Positioning System (KPS). By 2035, the Korean government expects to provide cm-level accuracy location services with 3 geostationary and 4 inclined orbit satellites, giving continuous coverage over Korea. KPS is expected to enable anything from autonomous vehicles to AAM, while pre-empting critical outages during emergency situations such as satellite jamming by North Korea. The researchers outline a step-by-step workflow across 3 scenarios: 1) flight over a megacity, 2) flight over a river, and 3) flight within a megacity, highlighting how several components of the KPS fit in.

Key takeaways:
The system comprises 3 entities: the space-based system, the ground-based system, and the vehicle. Ground-based systems are envisioned to be IoT sensors scattered around the city on buildings, streetlights, and communication towers.
Scenario #3 (flight within a megacity) is the most stringent of all, utilizing the “centimeter service of the KPS”. Scenario #2 (flight over a river) - the least challenging use case - only requires the “meter service” due to less expected signal interference.
Safety is further supplemented by a designated rectangular corridor, which its vertices would be updated in real-time by the ground-based system. This information would be fed into the mixed reality headset of the pilot.
The BFD: Having access to high-precision location information services that are reliable and robust is key to both piloted and autonomous UAM ops in cities. Coupled with UTM systems, vehicles should be able to “see through” bad weather and night, potentially enabling high operational frequencies which are key to UAM’s economic feasibility. Currently, no one really has solved this problem as one can attest to the unreliability of GPS or cellular service next to a skyscraper. In this case, infrastructure will have to come first to enable safe UAM ops in and above tight urban areas.
#3: Collision Risk and Operational Impact of Speed Change Advisories as Aircraft Collision Avoidance Maneuvers
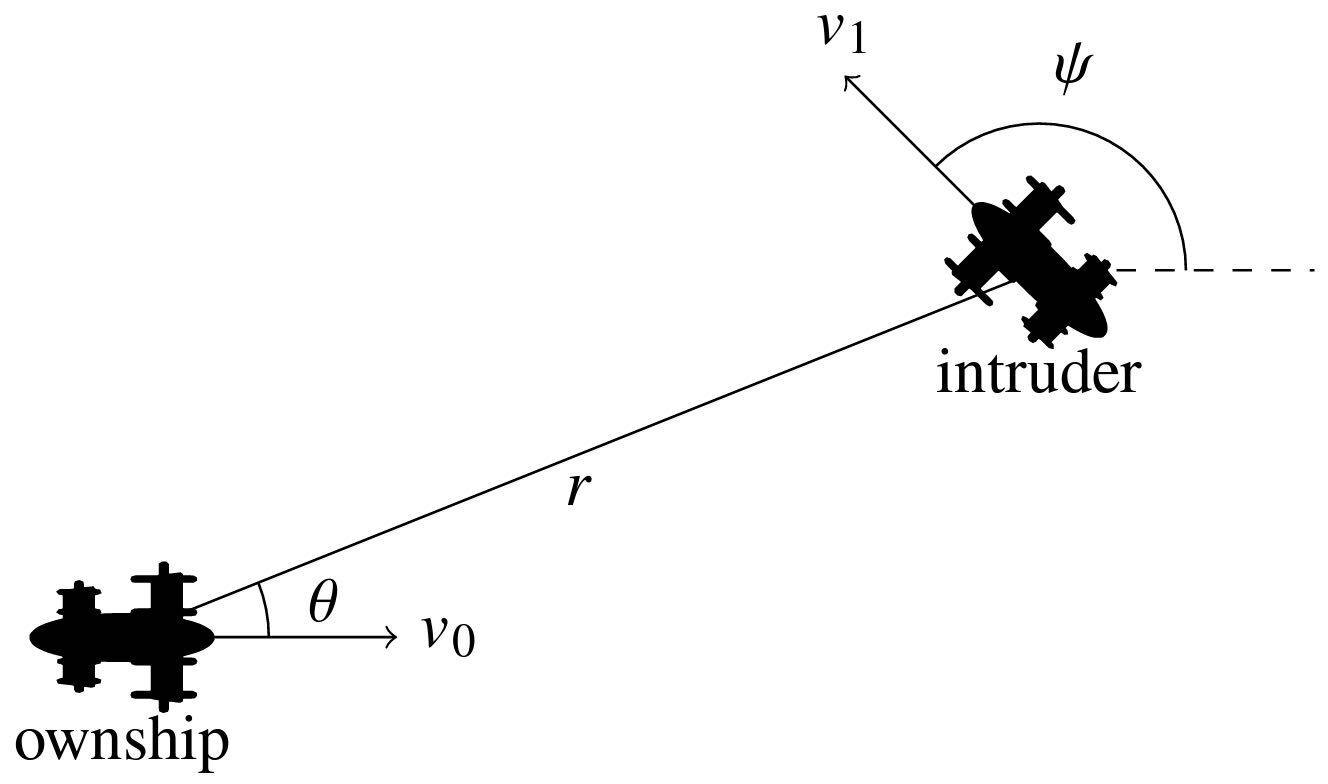
In this paper from Stanford and MIT, the authors propose a Markov Decision Process (MDP)-based algorithm which solely issues speed change commands to passenger vehicles for collision avoidance. Since the 1980s, traditional aircraft have avoided other aircraft through Traffic Collision Avoidance Systems (TCAS), issuing 1) vertical maneuvers (i.e. change altitude) and 2) horizontal maneuvers (i.e. change heading). For AAM vehicles that will operate in tight urban configurations with little room for trajectory divergence, speed changes (i.e. accelerate, decelerate or hover) may be the only solution. Thus, the researchers benchmark speed change advisories with existing algorithms across safety, efficiency, and pilot workload.
Key takeaways:
When only speed change advisories are issued to resolve conflict, the maximum risks allowable by ICAO and ASTM are exceeded by 4-12.5x. This range depends on if the intruder aircraft is equipped with a TCAS-like system and the type of maneuver considered.
When vertical, horizontal, and speed maneuvers are utilized in conjunction, there is a slight safety increase compared to the maneuvers used individually (excluding speed-only). However, this comes with the cost of an increased frequency of alerts to the vehicle/pilot: 3-4x compared to other algorithms.
Considering human factors for a piloted vehicle, the increased rate of alerts and multiple concurrent maneuvers may in fact decrease overall safety due to the pilot’s inability to attend to all alerts while controlling the aircraft. However, autonomous aircraft will not have this issue.
The BFD: Automated advisory & conflict resolution will be key to the introduction of AAM vehicles into complex airspace such as cities, low-altitude corridors, and airports. While there is little disagreement over the benefits of such tech which has been in use through TCAS for decades, the tactical implementation of collision avoidance software logic is yet to be determined. The Airborne Collision Avoidance System (ACAS X), which the FAA and industry have been working on since the early 2000s, will eventually introduce “TCAS 2.0” for all participants of the airspace.
#4: Priority-Aware Conflict Resolution for U-Space
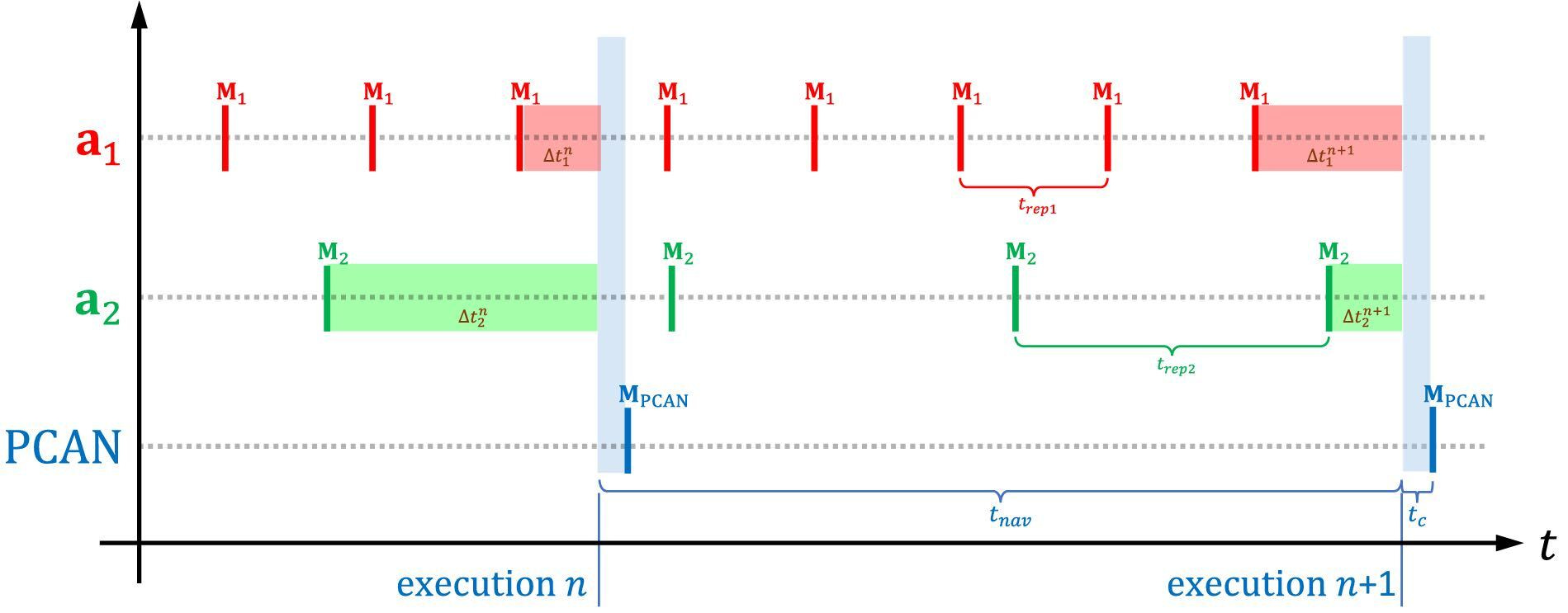
Researchers from the University of Castilla-La Mancha propose a tactical deconfliction algorithm: Prediction-based Conflict-free Adaptive Navigation (PCAN). This accounts for the priority class of vehicles in the system while resolving conflicts by adjusting the velocity vector of the UAS (horizontal + speed). PCAN utilizes concepts from the CORUS ConOps for European U-space which proposes 8 classes of priorities ranging from Class 1 (emergency) to Class 8 (leisure/sports) when it comes to resolving strategic and tactical conflicts. The researchers take this concept and implement it at a code level, simulating various drone densities & routes, and benchmarking it against other techniques.
Key takeaways:
PCAN with prioritization heavily shifts deconfliction maneuvers to lower-priority vehicles while keeping the overall system metrics the same. This means that during a tactical conflict, emergency drones only alter their trajectories minimally while leisure/sports drones are routed around higher-priority drones.
Compared to other state-of-the-art techniques such as BBCA and APF, PCAN with prioritization performs better across all metrics i.e. # of resolved conflicts, route distance increase & additional time spent in the air. However, this comes at the cost of increased computational time in high traffic densities.
PCAN considers communication latencies, position-velocity reporting frequencies, vehicle max speed, maneuverability, collision avoidance tech on-board, and delays between command & control when issuing resolution advisories. These factors could be considered when determining separation minima for AAM vehicles from a regulatory perspective.
The BFD: Equitable access to airspace is not only important from an economic opportunity perspective but for ensuring public acceptance of AAM as well. By prioritizing air ambulance, search & rescue, medical goods delivery, and security flights, clear societal benefits of future tech can be highlighted. Developing the most efficient and safe algorithm with minimal 2nd order effects on the aerial traffic system will balance prioritization with the business goals of drone and eVTOL operators.
#5: Urban air mobility noise prediction in a 3D environment using Gaussian beam tracing
In this paper from Delft University of Technology, researchers propose a novel sound propagation method - Gaussian Beam Tracing (GBT) - to accurately predict the noise propagation of an eVTOL in an urban setting. Atmospheric conditions and the cityscape can have a dominating effect on how noise spreads between buildings. Compared to ray-tracing - which is another popular method for modeling sound in complex environments - GBT can address shortcomings around mathematical discontinuities & singularities such as caustics and shadow boundaries.

Key takeaways:
GBT is validated against various ray- and wave-based methods and is found that it can accurately be applied to high-frequency noise problems for urban aircraft.
Weather conditions such as wind, temperature gradient, etc. can contribute up to a difference of +25 dB in the terrain and shadow regions.
GBT does not work as well with low-frequency sound and other complex phenomena as it does not model diffraction effects nor atmospheric turbulence.
The BFD: Having access to high-fidelity models for noise prediction can inform local governments, vertiport operators, and airlines in designing routes and vertiport networks. While routing can be flexible according to business needs and public feedback, ground infrastructure such as vertiports are highly fixed assets with a large price tag that can range from a few to 100s of millions of $. Therefore, sophisticated tools that can give good enough accuracy for noise will help carve out the optimal vertiport network with a public-friendly noise profile of UAM over a city.

This edition’s sponsor is Vertical Flight Society. VFS is a fantastic resource that I use to access leading technical papers and workshop decks for my work. Whether you are an investor, engineer, researcher, or entrepreneur, becoming a VFS member can give you an asymmetric advantage in the AAM space.
Membership gives discounted access to more than 15,000 technical papers, presentations, and articles. Learn more here.